








สรุป
Elfin-P series เป็นหุ่นยนต์ร่วมมือแบบ 6 แกนน้ำหนักเบาที่สามารถนำไปใช้กับสายการผลิตแบบบูรณาการโดยอัตโนมัติ การประกอบ การหยิบ การเชื่อม การเจียร การพ่นสี การทดสอบการจ่ายและสาขาอื่นๆ ความแม่นยำที่สูงขึ้นและการป้องกันที่แข็งแกร่งขึ้นช่วยให้มั่นใจถึงการใ
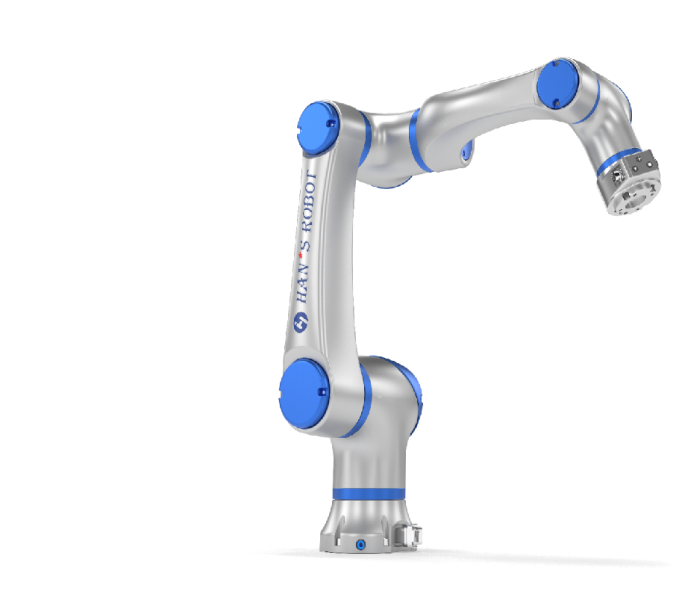
Elfin-P Series Collaborative Robot
คุณสมบัต
การจัดหมวดหม
Elfin-P Series Collaborative Robot
การติดต่อ
ประโยชน์:
ระดับการป้องกันที่สูงขึ้น:
การออกแบบระดับการป้องกันสำหรับการป้องกันฝุ่นและน้ำระดับ IP66 ช่วยให้มั่นใจได้ว่าสามารถใช้งานได้ฟรีในสภาพแวดล้อมที่รุนแรงและซับซ้อนของมลภาวะและความชื้นของน้ำมัน
ความเร็วในการตอบสนองที่เร็วขึ้น:
Ether CAT bus ใช้การสื่อสารระหว่างตัวควบคุมและข้อต่อแต่ละข้อ ซึ่งสามารถควบคุมความถี่รีเฟรช 1000Hz แบบเรียลไทม์และบรรลุการควบคุมที่แม่นยำของวิถีทางอุตสาหกรรมชั้นนำ
ป้องกันการรบกวนที่แข็งแกร่งขึ้น:
ความเข้ากันได้ทางแม่เหล็กไฟฟ้าที่แข็งแกร่งยิ่งขึ้นในสภาพแวดล้อมการรบกวนทางแม่เหล็กไฟฟ้าที่แข็งแกร่งยังคงสามารถทำงานได้ตามปกติ
ความแม่นยำสูง:
ความสามารถในการทำซ้ำสามารถเข้าถึงได้ถึง ± 02 มม. และจะไม่สูญเสียไปกับการเสียดสีของตัวลดขนาด
พารามิเตอร์
| Pattern | P03 | P05 | P05-L | P10 | P10-L | |||
| Weight | 18KG | 24KG | 25KG | 42KG | 45.5KG | |||
| Payload | 4KG | 6KG | 4KG | 12KG | 8KG | |||
Arm reach |
590mm | 800mm | 950mm | 1000mm | 1300mm | |||
Joint speed( Max) |
J1-J4 180°/S J5-J6 200°/S |
J1-J4 180°/S J5-J6 200°/S |
J1-J4 180°/S J5-J6 200°/S |
J1-J2 120°/S J3-J4 135°/S J5-J6 180°/S |
J1-J2 100°/S J3-J4 135°/S J5-J6 180°/S |
|||
Joint range |
±360° | |||||||
Tool speed( Max) |
2m/s | |||||||
| Repeatability | ±0.02mm | ±0.03mm | ±0.05mm | ±0.1mm | ||||
End I/O port |
digital input:3 digital output:3 analog input: 2 |
|||||||
Communication |
TCP/IP Modbus | |||||||
I/O source |
24V 2A | |||||||
Power input |
200-240V AC 50-60Hz | |||||||
Power |
100W in typical application |
180W in typical application |
350W in typical application |
|||||
Electric box I/O port |
digital input:16 digital output:16 analog input: 2 analog output: 2 |
|||||||
| Working temperature | 0-50℃ | |||||||
| IP Level | IP54/IP66 | |||||||
Main material |
อลูมิเนียมอัลลอยด์ |
|||||||
ตัวอย่าง