








สรุป
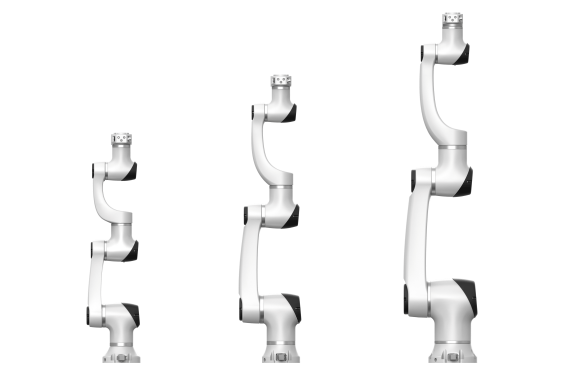
Elfin series หุ่นยนต์ร่วมปฏิบัติงาน 6 แกนสามารถนำไปใช้กับสายการผลิต การประกอบ การหยิบ การเชื่อม การเจียร การลงสี และสาขาอื่นๆ โดยอัตโนมัติ ประสบความสำเร็จในการส่งออกไปยังกว่า 50 ประเทศและภูมิภาครวมถึงยุโรป สหรัฐอเมริกา ญี่ปุ่น และเกาหลี หุ่นยนต์ร่วม
ประโยชน์:
การออกแบบของภาวะเอกฐานที่ดีที่สุด:
การออกแบบที่ไม่ซ้ำกันของแขนกลช่วยหลีกเลี่ยงการทำให้เป็นเนื้อเดียวกันของผลิตภัณฑ์และลดความแปลกประหลาดอย่างมีประสิทธิภาพระหว่างการเคลื่อนไหว.
โมดูลข้อต่อคู่แรกในจีน:
หุ่นยนต์มีสิทธิที่จะมีอิสระสูงเนื่องจากโครงสร้างจลนศาสตร์ที่โดดเด่นนี้ การออกแบบโมดูลแบบบูรณาการสูงสุดช่วยลดน้ำหนักตัวให้ได้มากที่สุด
ยืดหยุ่นได้ 6 องศา:
หุ่นยนต์ร่วมมือเพียงตัวเดียวที่มีโครงสร้าง โคแอกเซียล 4/6 แกนในประเทศจีน เกือบจะถึงความยืดหยุ่นของหุ่นยนต์อิสระ 7 องศาแล้ว
การทำให้เป็นโมดูล:
ตัวลด, มอเตอร์, ตัวเข้ารหัสและการควบคุม ไดรฟ์ ถูกรวมเข้าด้วยกัน
พารามิเตอร์:
| Model | E03 | E05 | E05-L | E10 | E10-L | ||
| Weight | 17KG | 23KG | 24KG | 40KG | 42.5KG | ||
| Payload | 3KG | 5KG | 3.5KG | 10KG | 8KG | ||
| Arm reach | 590mm | 800mm | 950mm | 1000mm | 1300mm | ||
Joint speed( Max) |
J1-J4 180°/S J5-J6 200°/S |
J1-J4 180°/S J5-J6 200°/S |
J1-J4 180°/S J5-J6 200°/S |
J1-J2: 100°/s J3-J4: 150°/s J5-J6: 180°/s |
J1-J2: 100°/s J3-J4: 150°/s J5-J6: 180°/s |
||
Joint range |
±360° | ||||||
Tool speed( Max) |
2m/s | ||||||
| Repeatability | ±0.03mm | ±0.05mm | ±0.1mm | ||||
End I/O port |
digital input:3 digital output:3 analog input: 2 |
||||||
Communication |
TCP/IP Modbus | ||||||
I/O source |
24V 2A | ||||||
Power input |
200-240V AC 50-60Hz | ||||||
Power consumption |
100W | 180W | 350W | 350W | |||
Electric box I/O port |
digital input:16 digital output:16 analog input: 2 analog output: 2 |
||||||
| Working temperature | 0-50℃ 0-50℃ |
||||||
IP Level |
IP54 | ||||||
Main material |
อลูมิเนียมอัลลอยด์ |
||||||
ตัวอย่าง